Since I was five years old, I have been a LEGO enthusiast, starting from simple assembly according to the manual to designing intricate details and creating my own unique models. However, as I grew older, simply putting together LEGO sets no longer satisfied my joy in constructing models. I began to think about how to turn blueprints into reality and how to make static designs move. So, I started to install servos in toys. By programming, I brought the models to life.
Lunar Rover Design Process:
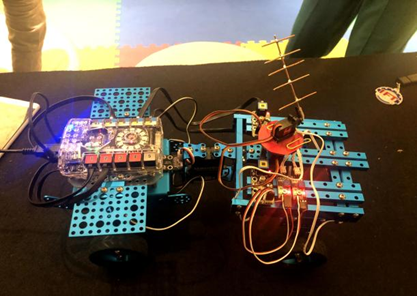
Inspired by China’s Chang’e-4’s successful landing on the far side of the moon,I designed and built a trackable rotating Yagi antenna. As the rover’s innovation,I used two photosensors at different angles to calculate the difference and rotate the antenna gimbal,simulating the rover’s ability to constantly track the “Queqiao” relay satellite while working on the far side of the moon.Additionally, I designed a sunlight-tracking solar panel for the rover,which simulates its ability to track solar energy sources during lunar daytime to better power the rover.
Introduction to the Conceptual Model of the Lunar Rover
1.The lunar rover is composed of a drive vehicle and a functional expansion vehicle. This design not only facilitates the phased transportation by space cargo ships but also allows for the loading of more payloads by swapping the expansion vehicle bodies.
2. The drive vehicle operates on tracks, enhancing its off-road capabilities. Additionally, the tracks are made of special materials to prevent the phenomenon of “cold welding” that can occur with traditional tracks in a vacuum environment.
3. Servo are installed at the joints of the vehicle body to facilitate steering by changing the angles. This approach eliminates the need for a complex wheel-steering mechanism and allows the track’s drive motors to operate at lower power (Traditional tracked vehicles require the tracks to move in opposite directions for steering, which creates significant resistance and requires high-power motors to drive. In the space environment, where energy is extremely precious, it is crucial to minimize power consumption). The steering angles of the servos are programmed with a safety range to prevent collisions between the vehicle bodies.
4. The drive vehicle features functional expansion areas at both ends, which can be used to load samples or attach additional payloads.
5. The expansion vehicle adopts a multifunctional frame equipped with a 360-degree rotating gimbal. This allows for the attachment of various payloads that require horizontal rotation, such as mechanical arms, lifting arms, radars, communication antennas, etc.
6. A robotic arm is mounted on the expansion vehicle’s gimbal, used for sample collection and cargo handling. An image sensor is installed above the robotic arm to provide remote imaging for the arm’s operations. An ultrasonic detector is located below the robotic arm to accurately measure the distance between the vehicle and the objects that need to be grasped.
The following is my designed model of the lunar rover.
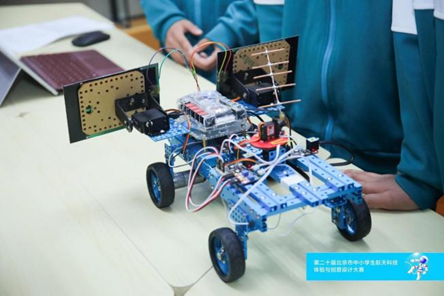
The image below is from my participation in the Beijing Youth Aerospace Science and Technology Experience and Creative Design Competition.


Lunar Rover Function Introduction Video
Lunar Rover Operation Demonstration Video
The image above is of the award certificate
(the First Prize for Beijing Youth Aerospace Science and Technology Experience and Creative Design Competition)